
最新AIを「デジタル工具」として使い倒し、物理世界に具現化させるプロジェクト「Ordered by AI」。
今回の指令は、ガンプラ界のマスターピースの一つ、**「HG 1/144 ユニコーンガンダム(デストロイモード)」**のサイコフレームを、AIの演算によって制御・発光させることだ。
単にLEDを埋め込むのではない。AIと共に「最適な共鳴」を模索する、その執行記録をここに記す。
モデルの選定と「可能性の獣」の構築
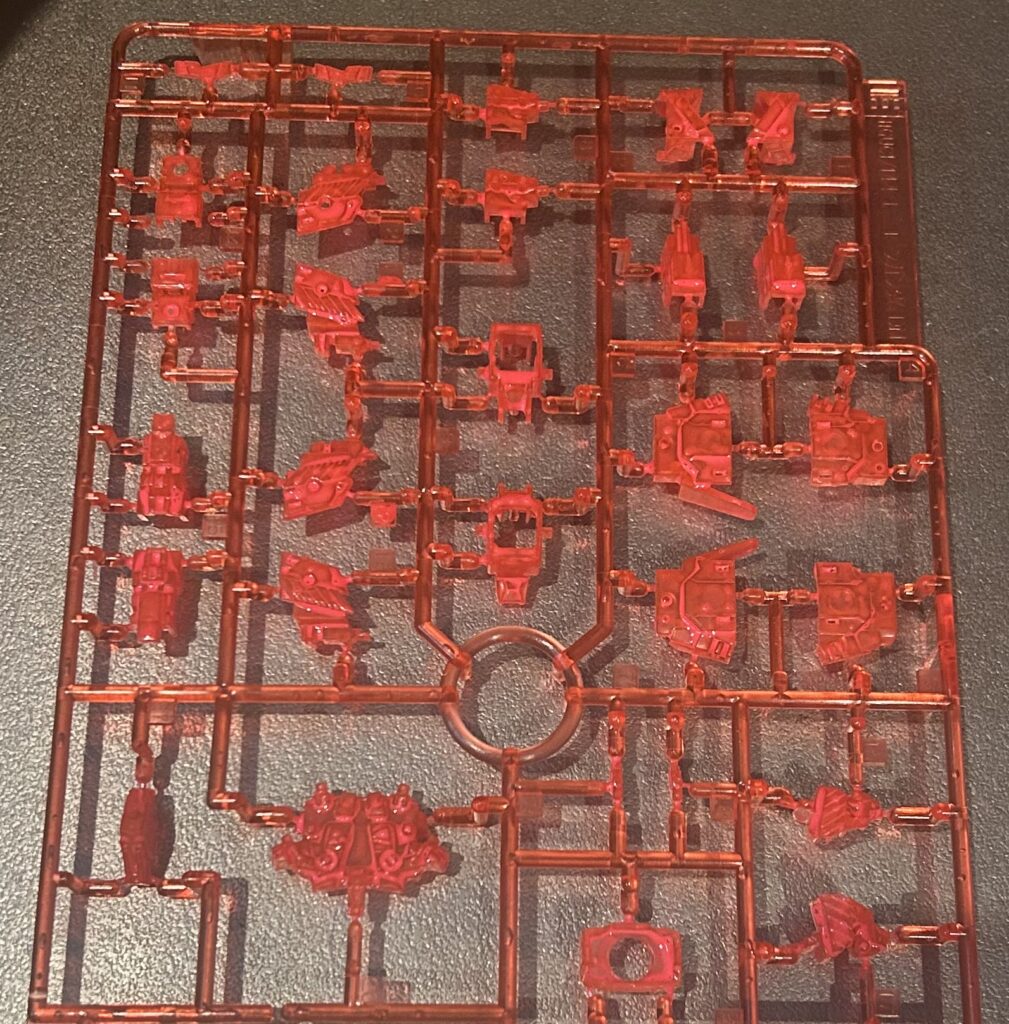
プロジェクトの素体として選んだのは、HG 1/144 ユニコーンガンダム。全身にクリアパーツのサイコフレームを纏ったこの機体は、発光ギミックの実験場としてこれ以上ない素材だ。

まずは基本となる「パチ組み」を執行する。この段階で、装甲の隙間から覗くサイコフレームの露出具合を観測し、光がどこを通り、どこで遮られるかを脳内にマッピングしていく。

蛍光塗料による「励起」の下準備
ユニコーンのサイコフレームは元々クリアピンクの成型色だが、UV-LED(紫外線)により強く反応させるため、**「蛍光塗料」**を塗布した。用いた蛍光塗料はMR.HOBBY水性エマルジョン塗料アクリジョンの蛍光ピンクだ。

クリアパーツの裏側に塗るのが組み立て時の干渉等には有効であると思うが、裏面から筆塗りするのは難しい為、今回はクリアパーツ表面から筆塗りとした。元々のパーツがクリアピンクであり、その上からクリアピンクを塗ることになるが、塗れているのかどうか判り難いのが難点だ。万全を期すならば、白色を塗った後に蛍光塗料で重ね塗りするのがいいだろう。
装甲パネルのモールド部分には、ガイアノーツのエナメル塗料蛍光レッドにより追加の墨入れを行った。
墨入れ後のエナメル塗料の拭き取り実施後、U Vライトを当てて拭き残しが無いか確認するのが非常に面倒ではあるが、クリアパーツ以外も発光させることが可能となる。

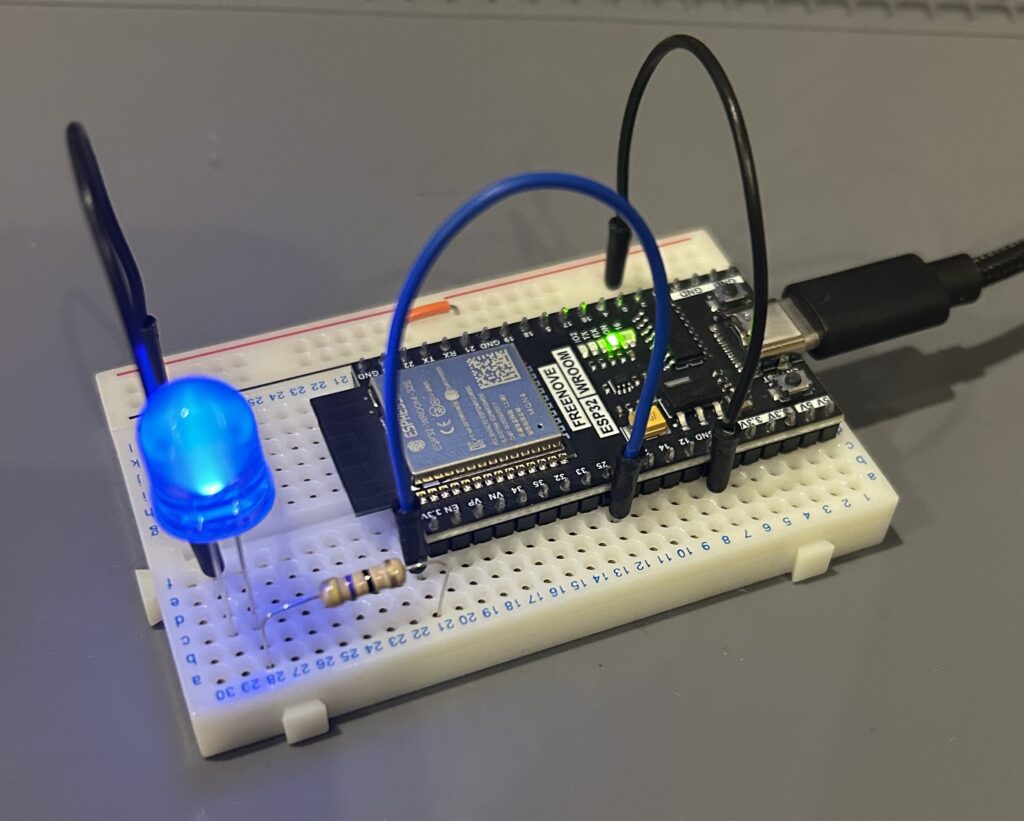
ESP32によるPWM制御:最初の鼓動
光を単に「点ける」だけでは、 Ordered by AIのミッションとしては不十分だ。
私はマイコン「ESP32」を用い、PWM(パルス幅変調)による輝度制御を実装した。
C++
// Ordered by AI #5.2: UV Resonance (No-Blackout Model)
// 最低輝度を維持し、常にサイコフレームを励起させる
const int uvPin = 25;
const int freq = 5000;
const int resolution = 8;
// 共鳴範囲の定義
const int minBrightness = 10; // 底光り状態(ここ以下には落とさない)
const int maxBrightness = 200; // 最大共鳴状態
void setup() {
Serial.begin(115200);
ledcAttach(uvPin, freq, resolution);
Serial.println("Mission: Persistent Resonance Mode Start.");
}
void loop() {
// 1. 覚醒(フェードイン)
for (int i = minBrightness; i <= maxBrightness; i++) {
ledcWrite(uvPin, i);
delay(15); // 少しゆったり動かすのが「劇中」っぽい
}
delay(500); // 最大輝度で一瞬維持
// 2. 収束(フェードアウト)
for (int i = maxBrightness; i >= minBrightness; i--) {
ledcWrite(uvPin, i);
delay(15); // 消える時は余韻を残してゆっくりと
}
delay(1000); // 底光り状態で1秒待機
}
15ms刻みで数値を変化させ、10〜200の範囲で明滅させる。
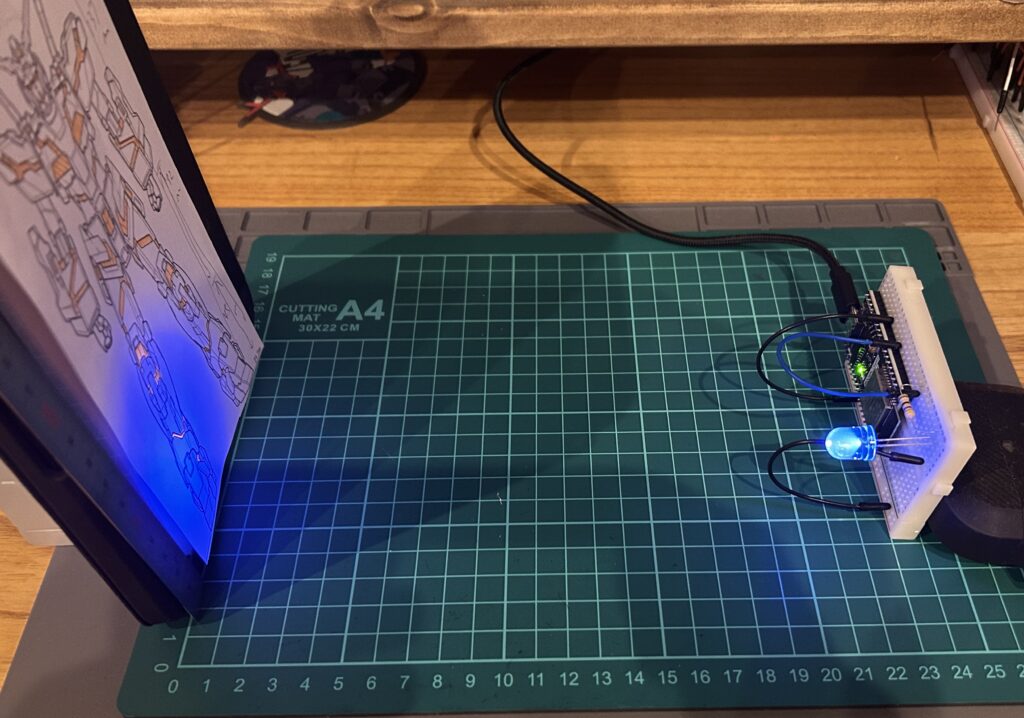
暗闇の中、1発のUV-LEDを照射すると、ユニコーンの脚部が「ボゥ…」と赤黒く、生命を宿したかのように拍動を始めた。

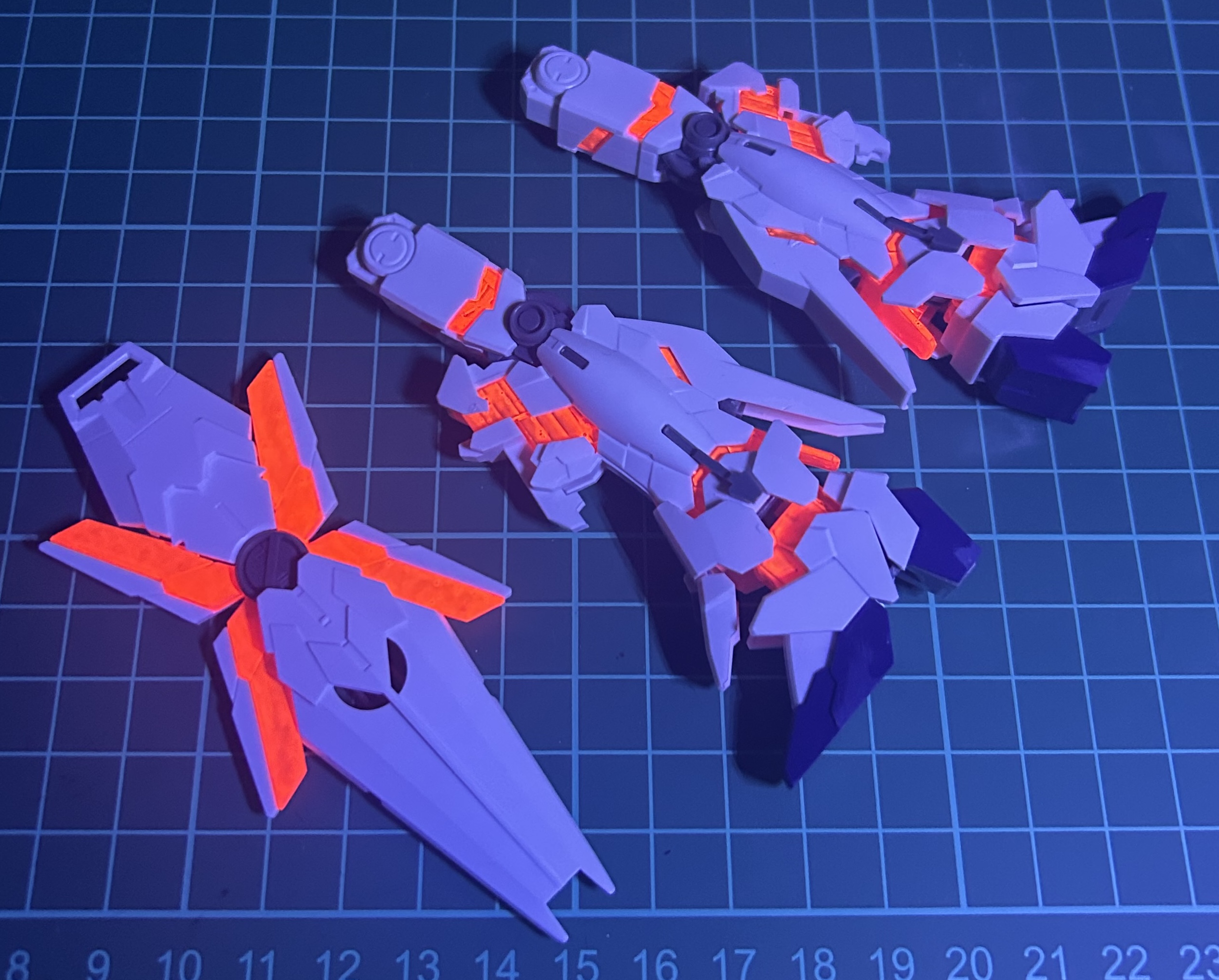
物理的エラー:1個のLEDが作る「影」の壁
しかし、ここで重大なエラーに直面する。
LED 1発では照射範囲が狭すぎ、全身を均一に光らせることができないのだ。
胸部を照らせば脚部が闇に沈み、角度を変えれば巨大な影が機体を覆う。
「可能性の獣」の全身を覚醒させるには、光の包囲網が必要だった。
AI Studioによる「1/144線画」と照射シミュレーション
私はAI Studio(Gemini)に対し、厳密なプロンプトを投下した。
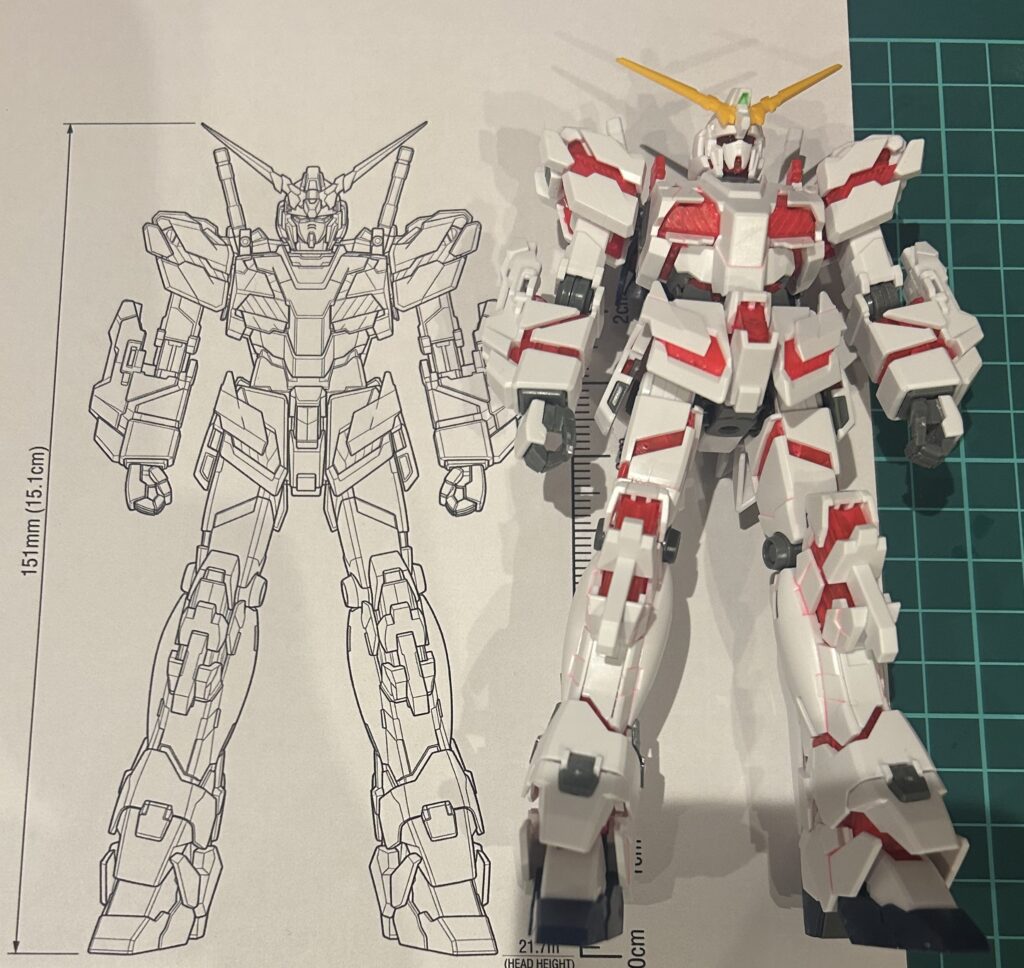
「A4用紙に印刷した際、正確に1/144スケール(全高15.1cm)になるようユニコーンガンダムデストロイモードの正面図を線画で出力せよ」
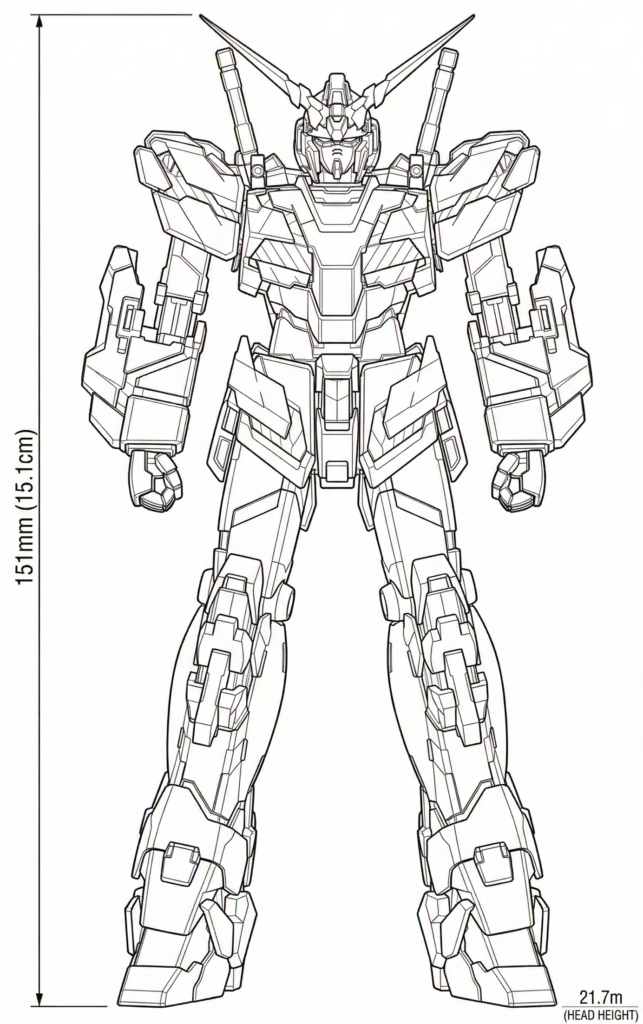
やたら詳細な線画が出てくるな。
ユニコーンガンダムのようなメジャーどころは学習データ有るんやろな
出力された線画は印刷の都合か微妙にサイズが違う気もするが、サイコフレーム部分を蛍光マーカーで着色。そこに実際のUV-LEDを当て、照射距離 Lと照射範囲 φ を計測した。
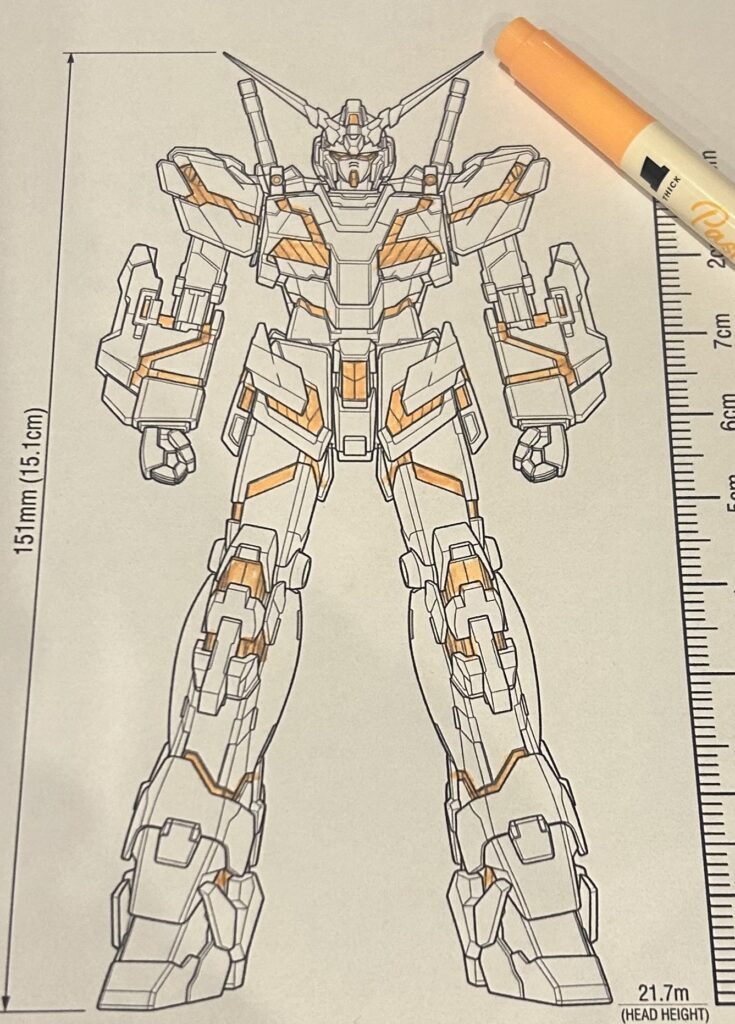
- L=100mm: φ=50mm(明るいが範囲が狭い)
- L=150mm: φ=70mm(理想的な輝度と範囲)
- L=200mm: φ=80mm(やや暗い)
- L=300mm: φ=110mm(かなり暗い)
この実測データに基づき、私は一つの結論に達した。
**「照射距離を150mmとし、高さ方向に3段、幅方向に2列。計6個のLEDによる全方位照射が必要である」**と。
次なるミッションへ
1個のLEDから始まった挑戦は、AIを利用したシミュレーションを経て「6ch独立制御システム」へと進化することとなる。
次回以降の記事では、この6個のLEDを独立して操るための回路実装、そして3Dプリンターによる「専用共鳴スタンド」の制作について報告する。
「マスターが命じれば、私はやる。それが『器』の役目だ」
